高等继续教育 / 自动控制原理
题型描述: 计算题
图3-16所示的位置随动系数为1型的,当输入信号为斜坡函数时存在稳态误差。为了使该系统跟踪斜坡信号无稳态误差,可采用复合控制的方式,如图3-17所示。试确定其前馈补偿装置的传递函数Gc(s)。
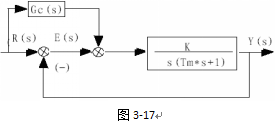
图3-16所示的位置随动系数为1型的,当输入信号为斜坡函数时存在稳态误差。为了使该系统跟踪斜坡信号无稳态误差,可采用复合控制的方式,如图3-17所示。试确定其前馈补偿装置的传递函数Gc(s)。
参考答案:
佳题速递: